ສາຍການຜະລິດອັດຕະໂນມັດ stator (ຮູບແບບຕ່ອງໂສ້ຄວາມໄວສອງເທົ່າ 2)
ລາຍລະອຽດຜະລິດຕະພັນ
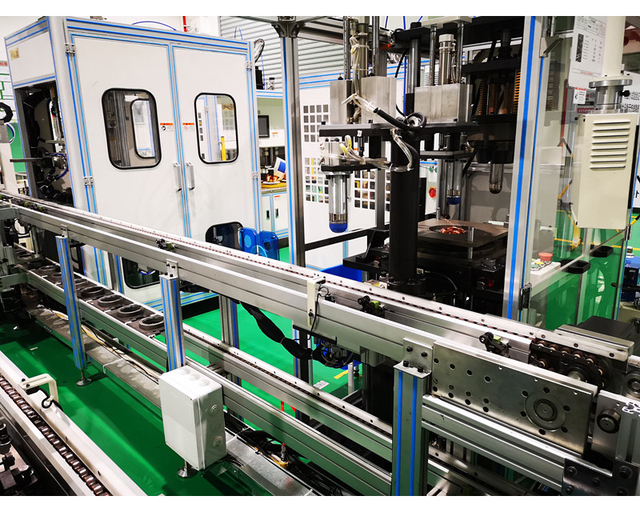
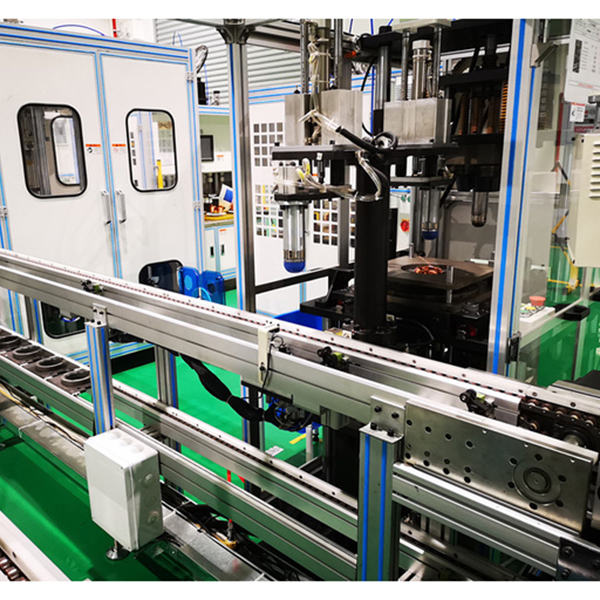
ສາຍການຜະລິດອັດຕະໂນມັດໂອນເຄື່ອງມືຜ່ານສາຍການປະກອບລະບົບຕ່ອງໂສ້ສອງຄວາມໄວ, (ລວມທັງການໃສ່ກະດາດ, winding, embedding, ຮູບຮ່າງລະດັບປານກາງ, ການຜູກມັດ, ສໍາເລັດຮູບແລະຂະບວນການອື່ນໆ) ດ້ວຍການຈັດຕໍາແຫນ່ງທີ່ຊັດເຈນແລະການປະຕິບັດທີ່ຫມັ້ນຄົງແລະເຊື່ອຖືໄດ້.
ໂຄງສ້າງ
ວິທີການປັບປະຈຸບັນຂອງ rotor ເຄື່ອງເຊື່ອມຈຸດອັດຕະໂນມັດ?
ການເຊື່ອມໂລຫະຈຸດອັດຕະໂນມັດຂອງ rotor ໃນເບື້ອງຕົ້ນໄດ້ຖືກຕິດຕັ້ງດ້ວຍຕົວຄວບຄຸມ AC ແລະເຄື່ອງເຊື່ອມຈຸດ AC, ແຕ່ກະແສບໍ່ສະຖຽນລະພາບຂອງເຄື່ອງເຊື່ອມຈຸດ AC ແລະບັນຫາຂອງການເຊື່ອມສະເໝືອນເຮັດໃຫ້ມັນຖືກແທນທີ່ດ້ວຍຕົວຄວບຄຸມ DC inverter ຄວາມຖີ່ປານກາງ, ເຄື່ອງປ່ຽນຄວາມຖີ່ລະດັບປານກາງ, ແລະເຄື່ອງເຊື່ອມຈຸດ. ໃນບົດຄວາມນີ້, ພວກເຮົາຈະປຶກສາຫາລືວິທີການຕ່າງໆໃນການປັບປະຈຸບັນຂອງ rotor ອັດຕະໂນມັດຈຸດ welder:
1. ການຄວບຄຸມໂຫມດພະລັງງານຄົງທີ່: ການໃຊ້ໂຫມດພະລັງງານຄົງທີ່ Q=UI ສາມາດຫຼີກເວັ້ນການເພີ່ມຂຶ້ນຂອງຄວາມຕ້ານທານຂອງ electrode ແລະອຸນຫະພູມໃນເວລາທີ່ໃຊ້ໂຫມດປະຈຸບັນຄົງທີ່, ແລະປ້ອງກັນບໍ່ໃຫ້ຄວາມຮ້ອນ Q = I2Rt ເພີ່ມຂຶ້ນ. ໂດຍການໃຊ້ໂໝດພະລັງງານສະເພາະ Q=UI, ຄວາມຮ້ອນສາມາດສົມດູນໄດ້.
2. ການວັດແທກແຮງດັນຂອງສາຍອັດຕະໂນມັດສອງ rotor: ການວັດແທກແຮງດັນຄວນໄດ້ຮັບການປະຕິບັດຢ່າງໃກ້ຊິດທີ່ສຸດເທົ່າທີ່ເປັນໄປໄດ້ກັບຂົ້ວບວກແລະລົບ. ຈຸດແມ່ນການຄວບຄຸມຄ່າແຮງດັນລະຫວ່າງຂົ້ວບວກແລະລົບ, ບໍ່ແມ່ນແຮງດັນຂອງວົງຈອນທັງຫມົດ.
3. ປ່ຽນຈາກ 1-pulse discharge ເປັນ 2-pulse discharge ຫຼື 3-pulse discharge (ໄລຍະເວລາການໄຫຼທັງຫມົດຍັງຄົງບໍ່ປ່ຽນແປງ), ແລະຫຼຸດລົງຄ່າພະລັງງານ (ຫຼືມູນຄ່າປະຈຸບັນ) ຕ່ໍາສຸດ. ຖ້າການໄຫຼຂອງກໍາມະຈອນຖືກນໍາໃຊ້, ມູນຄ່າພະລັງງານຈະຕ້ອງເພີ່ມຂຶ້ນເພື່ອບັນລຸຄວາມຮ້ອນການເຊື່ອມໂລຫະທີ່ຕ້ອງການ. ຖ້າການໄຫຼຂອງກໍາມະຈອນເຕັ້ນສອງຄັ້ງຖືກນໍາໃຊ້ (ມູນຄ່າການໄຫຼຂອງກໍາມະຈອນທໍາອິດແມ່ນຖືກກໍານົດໄວ້ຕ່ໍາ, ແລະມູນຄ່າການໄຫຼຂອງກໍາມະຈອນທີສອງແມ່ນຖືກກໍານົດສູງ), ມູນຄ່າພະລັງງານ (ຫຼືມູນຄ່າປະຈຸບັນ) ສາມາດຫຼຸດລົງຢ່າງຫຼວງຫຼາຍສໍາລັບການເຊື່ອມໂລຫະ. ການຫຼຸດລົງຂອງມູນຄ່າພະລັງງານ (ຫຼືມູນຄ່າປະຈຸບັນ) ເຮັດໃຫ້ການສວມໃສ່ຂອງ electrode ຫຼຸດລົງແລະປັບປຸງສະຖຽນລະພາບການເຊື່ອມໂລຫະ. Q = I2Rt ຫມາຍຄວາມວ່າການສະສົມຂອງຄວາມຮ້ອນໄດ້ຮັບຜົນກະທົບຈາກການເພີ່ມຂື້ນຂອງມູນຄ່າໃນປະຈຸບັນ. ດັ່ງນັ້ນ, ເມື່ອກໍານົດພາລາມິເຕີ, ຫຼຸດຜ່ອນມູນຄ່າປະຈຸບັນ (ຫຼືມູນຄ່າພະລັງງານ) ຕ່ໍາສຸດ.
4. ປ່ຽນແທນ electrode tungsten ໃນ hook ພາຍໃຕ້ຈຸດ welder ດ້ວຍ electrode ລົບ, ເນື່ອງຈາກວ່າປະຈຸບັນໄຫຼຈາກ hook ໄປຫາ electrode tungsten, ເຮັດໃຫ້ "ການເຄື່ອນໄຫວຂອງເອເລັກໂຕຣນິກ", ເຮັດໃຫ້ປະລໍາມະນູໂລຫະຫນ້ອຍໄຫຼກັບ electrode, ເຮັດໃຫ້ມັນເປື້ອນແລະຫມົດ. "ການເຄື່ອນໄຫວທາງອີເລັກໂທຣນິກ" ຫມາຍຄວາມວ່າການໄຫຼວຽນຂອງເອເລັກໂຕຣນິກ valence ໂລຫະເຮັດໃຫ້ເກີດການເຄື່ອນໄຫວຂອງຮ່າງກາຍຂອງນ້ໍາທີ່ມີປະລໍາມະນູໂລຫະ.
ອີງຕາມວິທີການຂ້າງເທິງ, ການປັບຕົວໃນປະຈຸບັນຂອງເຄື່ອງເຊື່ອມສາຍອັດຕະໂນມັດຂອງ rotor ສາມາດສໍາເລັດສົບຜົນສໍາເລັດ. ບົດຄວາມນີ້ມີຈຸດປະສົງເພື່ອເຂົ້າໃຈດີກວ່າການນໍາໃຊ້ກົນຈັກໄຟຟ້າຂອງ rotor ອັດຕະໂນມັດຈຸດເຊື່ອມສາຍໄຟເພື່ອປັບປຸງປະສິດທິພາບການຜະລິດແລະປະຫຍັດພະລັງງານ. ນອກຈາກນັ້ນ, ການບໍາລຸງຮັກສາປົກກະຕິເລື້ອຍໆຄວນໄດ້ຮັບການປະສົມປະສານເຂົ້າໃນການດໍາເນີນງານຂອງສາຍການຜະລິດ rotor ອັດຕະໂນມັດ. ນີ້ປະກອບສ່ວນໃຫ້ອາຍຸຍືນແລະຄວາມຖືກຕ້ອງຂອງການດໍາເນີນງານຂອງມັນ.
